
Bauen Sie die Zukunft in 3D
Die 3D-Plattform, die jedes Team vereint
Erstellen
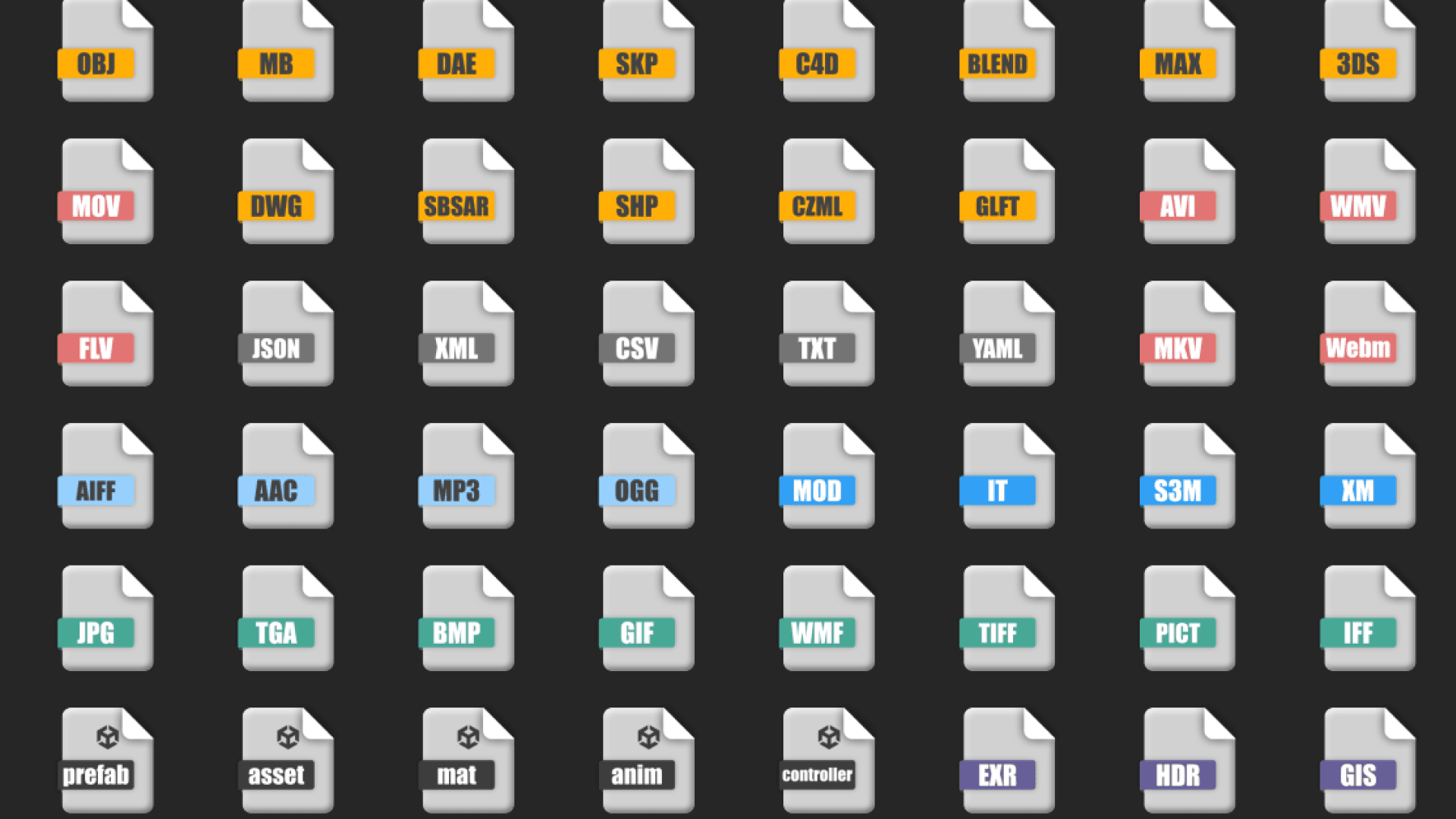
Verbinden
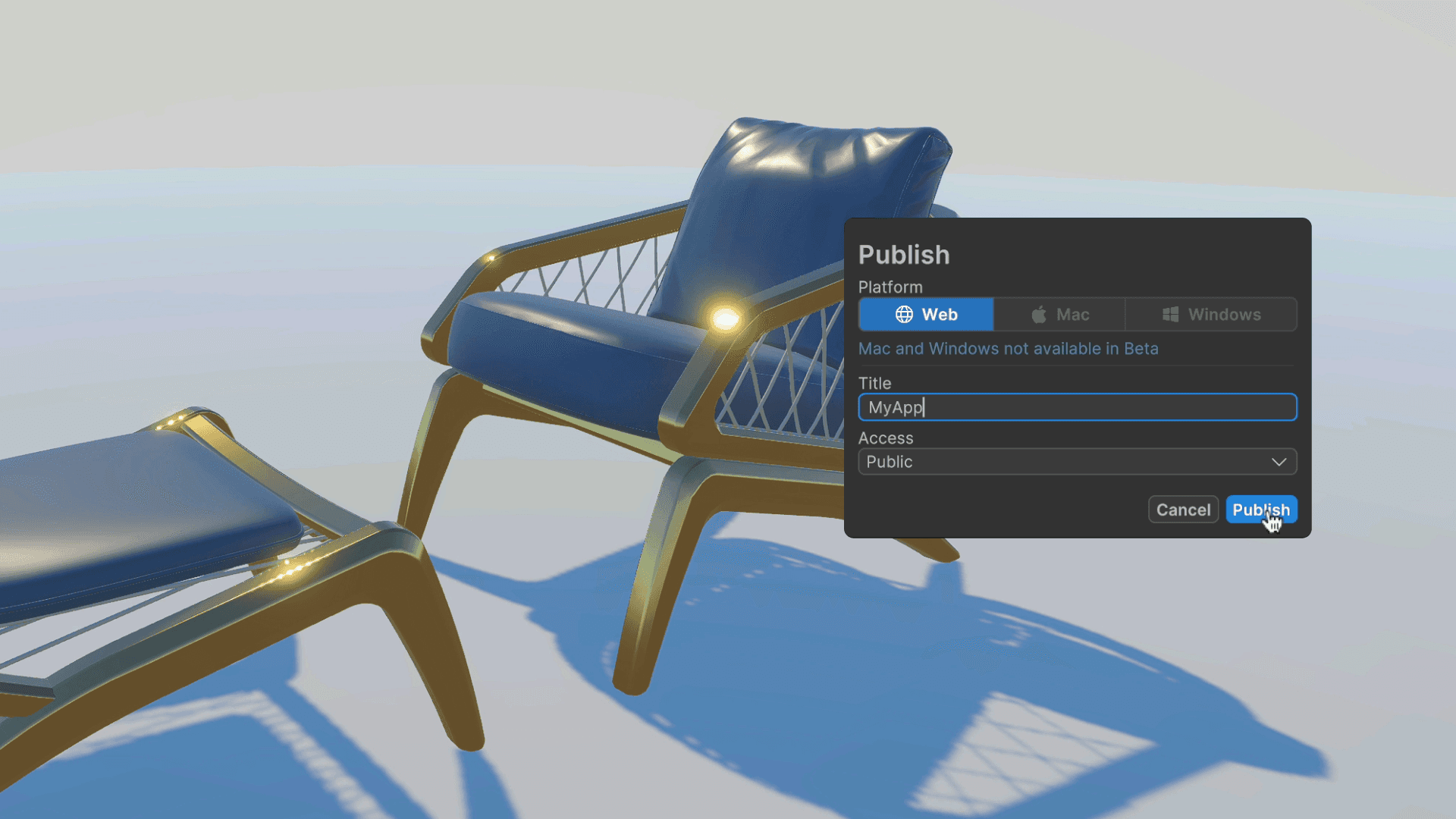
Bereitstellen

Zusammenarbeiten
Lernen Sie die Teams kennen, die neu definieren, wie die Welt erlebt wird

Eine Plattform, endlose Anwendungen
Prototyping
Bringen Sie Ideen in nur wenigen Stunden als interaktive 3D-Modelle zum Leben, anstatt Wochen zu benötigen, damit Sie schneller testen, iterieren und validieren können als je zuvor.
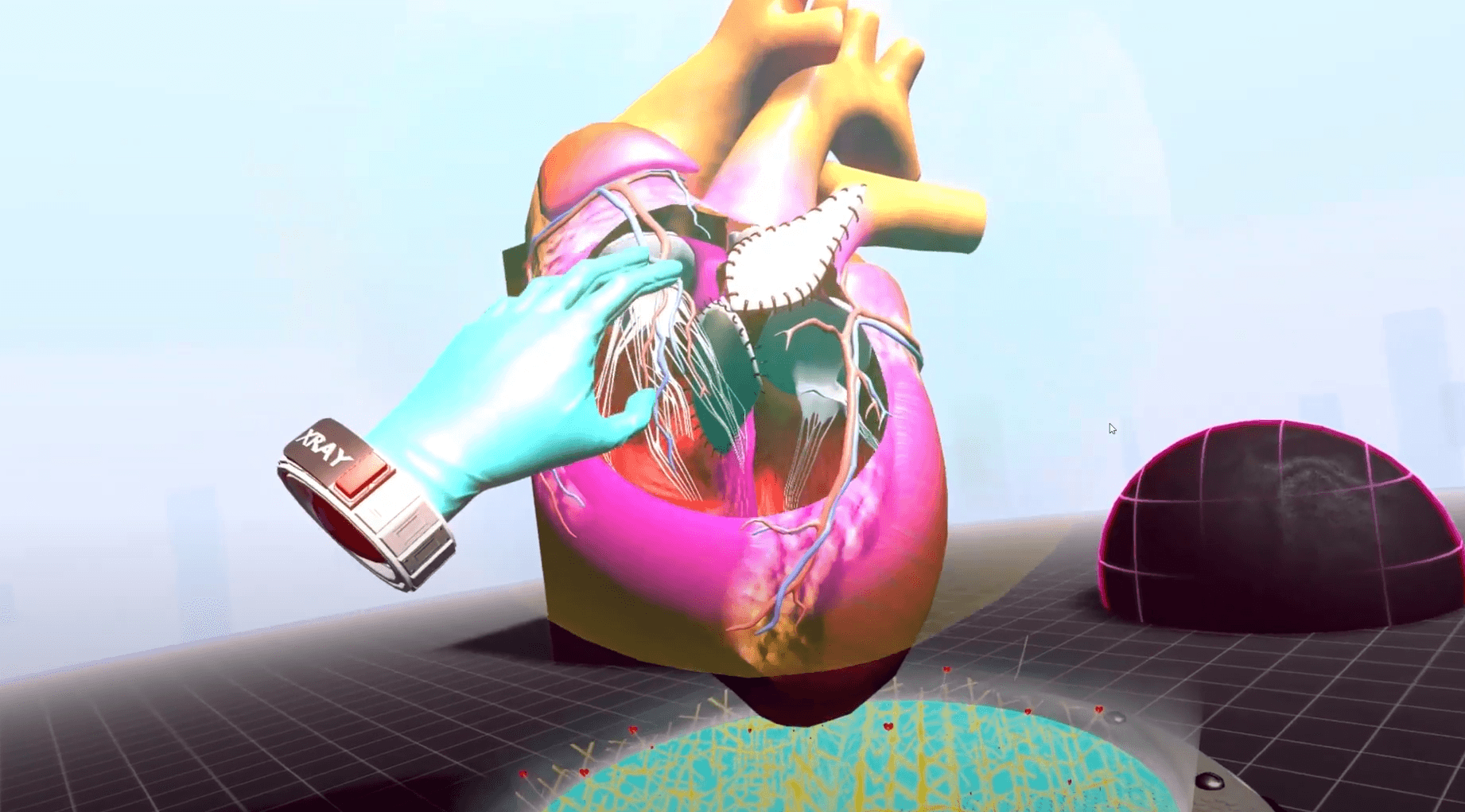
Schulung
Ausrüsten von Teams mit immersiven Simulationen zur Verbesserung von Sicherheit und Bereitschaft, bevor die Produktion beginnt.
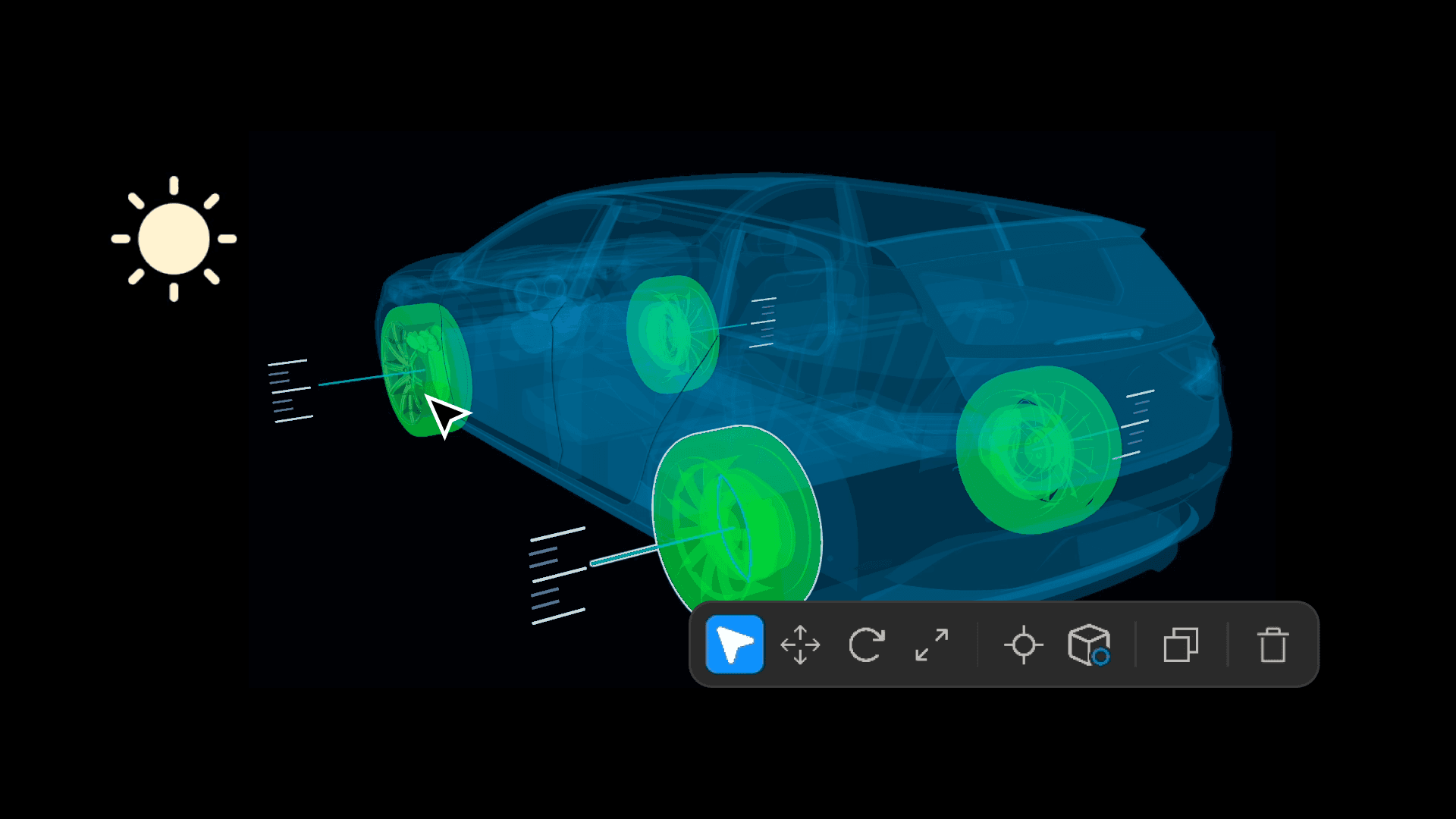
Digital Twins
Erstellen Sie Echtzeit-3D-Nachbildungen physischer Systeme, um Probleme zu identifizieren, die Leistung zu optimieren und Abfall zu reduzieren.
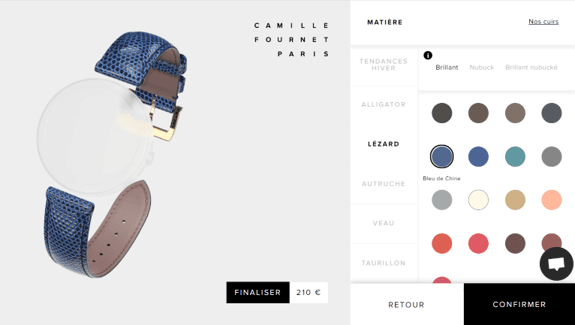
Produktkonfiguratoren
Ermöglichen Sie Kunden, Produkte zu erkunden und anzupassen, um Engagement und Vertrauen bei jedem Kauf zu fördern.
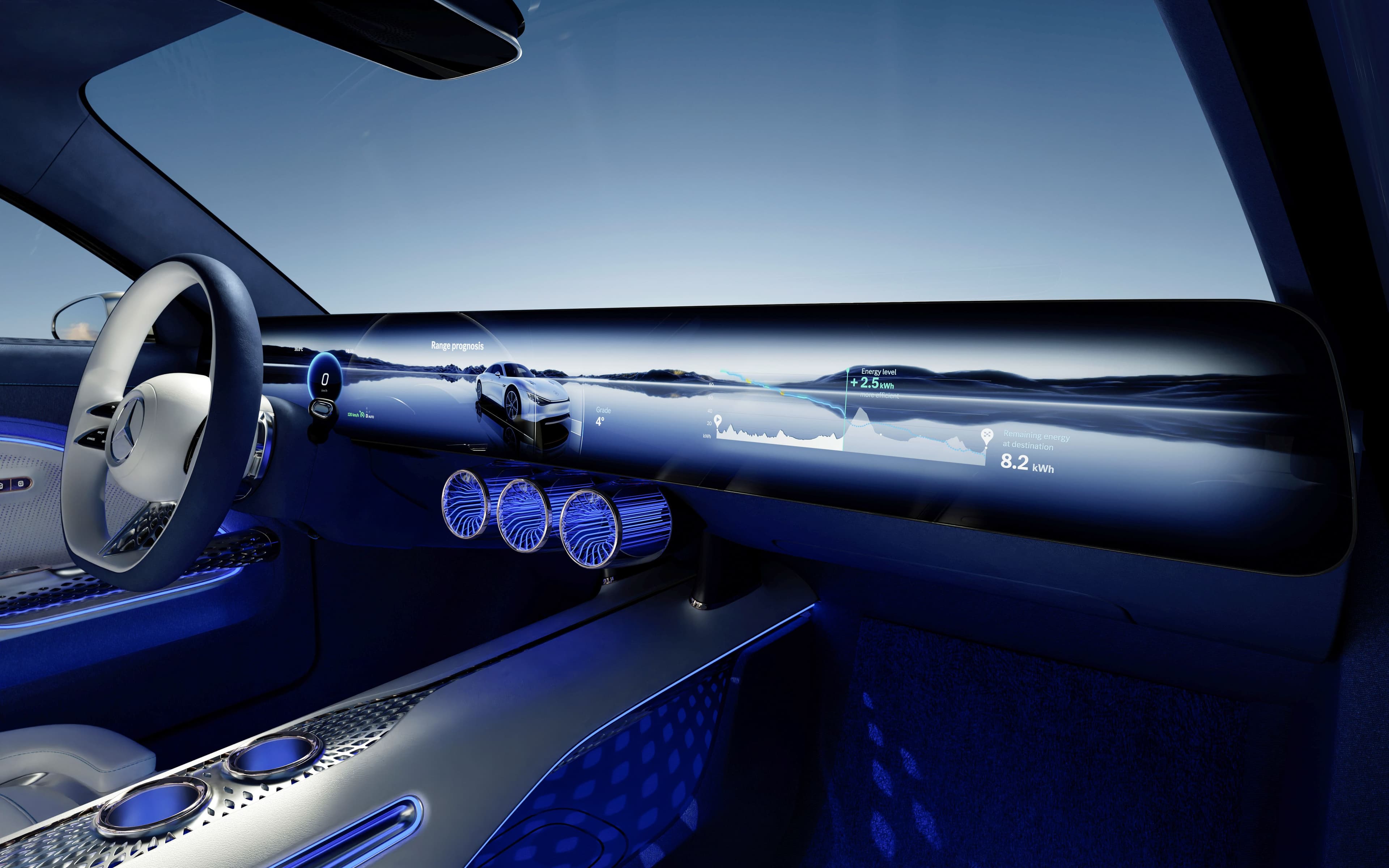
Mensch-Maschine-Schnittstellen (HMI)
Entwerfen, testen und verfeinern Sie die Erfahrungen der Bediener, um Benutzerfreundlichkeit und Effizienz sicherzustellen, bevor sie die Produktionslinie erreichen.

Unity für das Industriepartnerprogramm
Unser Partnerprogramm ist auf Ihre Bedürfnisse zugeschnitten, egal ob Sie kreative Beratungsdienste anbieten oder Unity-basierte Softwarelösungen entwickeln.
1. Stand: September 2023. Quelle: Abgeleitet aus internen Unity-Ressourcen.
